I haven't written much about the Tigerbug project in a while, but I wanted to share the paper that our team wrote. Please take a look and give any feedback that you have in the comments below. I am very interested in what people have to say about the project!
Wednesday, July 31, 2013
RIT Tigerbug Paper
I haven't written much about the Tigerbug project in a while, but I wanted to share the paper that our team wrote. Please take a look and give any feedback that you have in the comments below. I am very interested in what people have to say about the project!
Monday, July 22, 2013
Learning to Learn

Wednesday, July 17, 2013
The Sentience Stack
A good friend of mine, Eric Neuman, has proposed a roadmap to a living, motivated, creative, sentient being built entirely with Artificial Intelligence and computers. The best part about the project is that it is open source (meaning github)! The project is just beginning, but really seems to have legs. Here is a more apt description of the project:
via simpleactually:
via simpleactually:
I am joining in on this project and would encourage others interested in Artificial Intelligence to do the same. Read more about the project at Eric's blog and get involved!Artificial intelligence sounds awesome, doesn’t it? Machines that can solve problems on their own or answer questions for us would represent an enormous leap forward for all of mankind. The problem is, artificial intelligence as it exists today is not very flexible. Today, AIs are trading stocks, beating you at video games, filtering spam out of your email and handling a myriad of other tasks, each one specialized for its particular chore.Therein lies the rub, each AI needs to be custom built by a programmer specializing in artificial intelligence or machine learning. In other words, it is currently possible to build machines that learn, but these machines can not learn how to learn. If we want machines that can truly solve problems, answer questions on their own, and eventually grow to be sentient minds, we need to overcome that obstacle.

Tuesday, July 2, 2013
Extending the Range of the Drone
Another fascinating area that I have looked into has been how to extend the range of the drone. After talking with another ham radio operator, the RFDude, I did some testing on my own. He gave me a wifi antenna connector platform for me to test with and I built a 2.4 GHz "Cantenna" to try. A cantenna is literally an antenna made from cans. Surprisingly, it worked! I followed these instructions for my build and added an extra can to improve the directionality and hopefully the distance. Here's some pics after the break
AR Drone Developments
This past week has been chock-full of AR Drone developments. First of all, I made the switch from Javascript (node.js) to Python development. This was an important step because developing with Javascript was counter-intuitive and was becoming a pain for me. I also wasn't interested in viewing the video online, but rather in an app on the computer, where I could do more filtering with OpenCV. I am using a python library called libardrone (https://github.com/venthur/python-ardrone) that has given me control of the quadcopter with minimal complexity. So far I have been able to do all sorts of development including autonomous and controlled flying.
Subscribe to:
Posts (Atom)
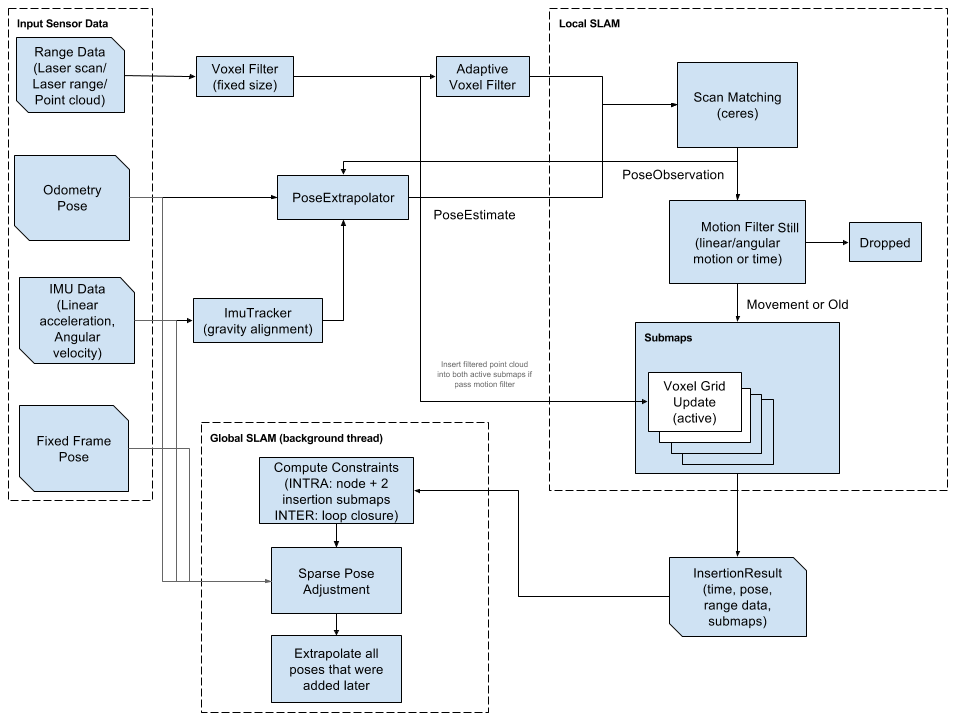
Working with Google's Cartographer SLAM Package
At my current position, at Canvas Construction, I have worked with a number of SLAM and localization packages. In the past few years, my wor...
-
At my current position, at Canvas Construction, I have worked with a number of SLAM and localization packages. In the past few years, my wor...
-
 https://github.com/team401/Vision-Tutorials/wiki/Yaw-and-Pitch In recent weeks, I have spent some time brushing up on as many types of A...
https://github.com/team401/Vision-Tutorials/wiki/Yaw-and-Pitch In recent weeks, I have spent some time brushing up on as many types of A... -
 It's been a while since I last posted, because I was working hard over at Navisens. After about 3 years, I am now back on the market...
It's been a while since I last posted, because I was working hard over at Navisens. After about 3 years, I am now back on the market...
