This is the RIT Tigerbug robot! My partner, Andy Anthony and I designed, built and programmed this robot for our Advanced Robotics project at RIT. The robot is built extremely solidly with 18 Roboard 1270 servos. The body and legs are made of bi-weave carbon fiber and structural foam sandwich for added strength and reduced weight. Currently it is being run by a windows PC communicating via serial cable, but we hope to implement an on-board computer such as the Roboard 100 Single Board Computer so that the robot will be completely wireless. The robot is controlled by a wireless Xbox 360 controller and does a lot of processing. Building this robot was a great experience, and I learned a ton about robotics.
Wednesday, May 15, 2013
CUPID Robot
So, it's been a while since I last posted. I've been very busy working on my Master's degree. Luckily, my degree is in robotics, so I have been working diligently on a few projects that I want to share. During the winter quarter, I built a robot called the "CUPID" Robot. It is a Nerf gun wielding autonomous robot, like those in Transformers. It essentially finds the color red, aims at it and then shoots at it. It uses a CMUCam4 to perform the color tracking, and has 2 little Hitec motors performing tilt/pan duties. The onboard microcontroller is a Basic ATOM, so it is a little light on the processing. However, the robot easily finds the color red and manages to hit it pretty accurately. The toughest part was calibrating the color sensor to always find the color and not take in too much. CMUCam4 is a cool little device that made it easy to do color tracking with the Basic ATOM. I would love to use it in other projects with more advanced microcontrollers. It's also a pretty good stepping stone to more advanced image processing techniques.
Here is a video of the CUPID robot:
Here is a video of the CUPID robot:
Subscribe to:
Posts (Atom)
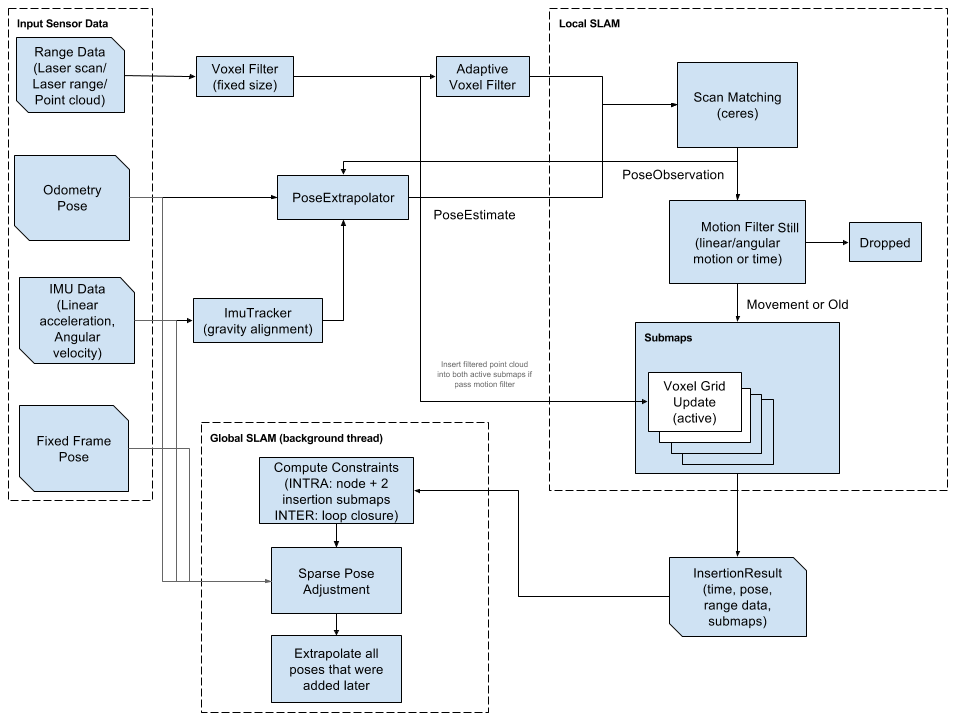
Working with Google's Cartographer SLAM Package
At my current position, at Canvas Construction, I have worked with a number of SLAM and localization packages. In the past few years, my wor...
-
At my current position, at Canvas Construction, I have worked with a number of SLAM and localization packages. In the past few years, my wor...
-
 https://github.com/team401/Vision-Tutorials/wiki/Yaw-and-Pitch In recent weeks, I have spent some time brushing up on as many types of A...
https://github.com/team401/Vision-Tutorials/wiki/Yaw-and-Pitch In recent weeks, I have spent some time brushing up on as many types of A... -
 Since my previous post on AHRS types, I have made some additional changes to the three systems. Specifically, I have added the magnetometer...
Since my previous post on AHRS types, I have made some additional changes to the three systems. Specifically, I have added the magnetometer...
